

Powiązane produkty



Robot humanoidalny UNITREE G1 Edu U8
Robot humanoidalny Unitree G1 EDU U8 to rozbudowana platforma badawczo-edukacyjna, która łączy humanoidalną sylwetkę (około 1270 mm wysokości i około 35 kg) z 37 stopniami swobody oraz zapleczem obliczeniowym gotowym na ambitne projekty. Dzięki płynnej kinematyce, rozbudowanej percepcji i wsparciu rozwoju algorytmów model sprawdza się zarówno w nauce sterowania ruchem, jak i w zadaniach manipulacyjnych, a jego wydajność AI do 100 TOPS pozwala pracować z danymi z czujników w czasie rzeczywistym.
Ruch płynny, stabilny i gotowy na dynamiczne sekwencje
G1 EDU U8 porusza się pewnie dzięki dużej liczbie przegubów i szerokim zakresom ich pracy, co przekłada się na naturalną dynamikę chodu oraz stabilność przy zmianach pozycji. Robot potrafi wykonywać złożone sekwencje, w tym szybkie przejścia pomiędzy ruchami, wchodzenie po schodach czy elementy ruchowe wymagające koordynacji całego ciała, a maksymalny moment obrotowy kolana 120 Nm wspiera mocny krok i kontrolę w bardziej wymagających manewrach.
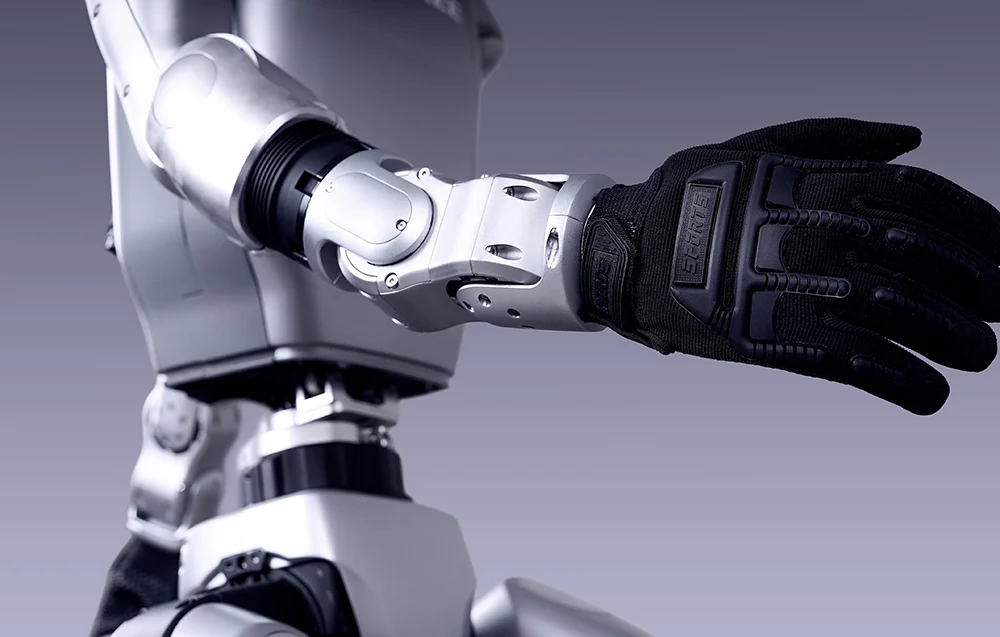
Zręczne dłonie do praktycznej manipulacji przedmiotami
Wersja U8 korzysta z dwóch trójpalczastych dłoni Dex3-1 (bez czujników dotyku), które pozwalają na precyzyjne chwytanie i operowanie obiektami w typowych zadaniach laboratoryjnych. Dzięki możliwości pracy na kontroli siły i pozycji robot może przenosić elementy o różnej wielkości, ustawiać je w docelowych miejscach i realizować ćwiczenia z manipulacji, które wymagają powtarzalności oraz przewidywalnego zachowania chwytu.

Moc obliczeniowa i narzędzia, które wspierają rozwój algorytmów
Za przetwarzanie danych odpowiada wydajna jednostka bazowa z 8-rdzeniowym procesorem, a moduł AI zapewnia zasoby do uruchamiania modeli i logiki sterowania w czasie rzeczywistym. Platforma daje dostęp do materiałów dla zespołów wdrożeniowych - obejmuje API, dokumentację i przykłady oraz umożliwia pracę zarówno na poziomie wysokim, jak i niskim, co ułatwia budowę własnych zachowań, testy oraz iteracyjne usprawnianie rozwiązań.

Percepcja otoczenia i łączność do pracy w zespole i w systemie
Robot wykorzystuje zestaw czujników, w tym kamerę głębi oraz skaner laserowy 3D, aby dokładniej rozpoznawać przestrzeń i wspierać orientację w otoczeniu. System audio z głośnikami stereo i matrycą mikrofonów ułatwia interakcję głosową, a stabilną komunikację i integrację z innymi urządzeniami zapewniają Wi-Fi 6 oraz Bluetooth 5.2, co ma znaczenie przy przesyłaniu danych, sterowaniu i pracy zewnętrznych systemów.

Praca w praktyce: zasilanie, serwis i gotowość do eksperymentów
Zastosowany akumulator zapewnia około 2 godziny pracy i można go szybko zdemontować do ładowania lub wymiany, co pomaga utrzymać ciągłość testów. Wewnętrzne prowadzenie przewodów przez puste osie przegubów, podwójne enkodery oraz lokalne chłodzenie powietrzem wspierają stabilność konstrukcji, a aktualizacje Smart OTA pozwalają rozwijać oprogramowanie i wprowadzać usprawnienia bez zbędnych przestojów.

Platforma humanoidalna do R&D, edukacji i prototypowania przyszłych rozwiązań
G1 EDU U8 łączy możliwości bazowej serii edukacyjnej z rozszerzeniem o dłonie Dex3-1, dzięki czemu staje się narzędziem do budowania i testowania rozwiązań w obszarach AI, sterowania ruchem i autonomii. To platforma dla laboratoriów, uczelni i zespołów R&D, która wspiera naukę przez praktykę, eksperymenty z zachowaniem robota i projekty skupione na interakcji człowiek–maszyna w środowiskach, gdzie liczy się powtarzalność, elastyczność i możliwość szybkiego rozwoju.

W zestawie otrzymujesz:
- Robot Unitree G1 EDU U8
- Ręczny kontroler
- Ładowarka
- Inteligentny akumulator
| Robot humanoidalny UNITREE G1 Edu U8 | |
|---|---|
| Producent | Unitree |
| Model | G1 EDU U8 |
| Wymiary (pozycja stojąca) | 1270 × 450 × 200 mm |
| Wymiary (pozycja złożona) | 690 × 450 × 300 mm |
| Masa (z akumulatorem) | Ok. 35 kg |
| Łączna liczba stopni swobody | 37 DoF |
| Stopnie swobody - jedna noga | 6 DoF |
| Stopnie swobody - pas | 3 DoF |
| Stopnie swobody - jedno ramię | 7 DoF |
| Stopnie swobody - nadgarstek | 2 DoF |
| Dłonie | 2 × zręczne, sterowane siłowo dłonie trójpalczaste Dex3-1 (bez czujników dotyku) |
| Funkcje i możliwości | Chód, bieg, chodzenie po schodach, chwytanie/manipulacja obiektami (dłonie trójpalczaste), taniec |
| Zakresy ruchu przegubów | Pas (oś Z): ±155° Biodro: Pitch ±154°, Roll od -30° do 170°, Yaw ±158° Kolano: od 0° do 165° |
| Prowadzenie przegubów | Wewnętrzne, puste osie przegubów |
| Enkodery | Podwójne enkodery |
| Chłodzenie | Lokalne chłodzenie powietrzem |
| Maksymalny moment obrotowy kolana | 120 Nm |
| Maksymalny udźwig ramienia | 3 kg |
| Długość uda + podudzia | 0,6 m |
| Rozpiętość ramion | Ok. 0,45 m |
| Zasilanie | Pakiet akumulatorów (13 stringów) |
| Akumulator | Inteligentny, szybkozłączny |
| Czas pracy | Ok. 2 h |
| Procesor | 8-rdzeniowy wysokowydajny CPU |
| Moduł obliczeniowy/dock rozszerzeń | 100 TOPS |
| Wsparcie algorytmów AI | Tak |
| Narzędzia deweloperskie | Tak |
| Wsparcie techniczne | Tak |
| Secondary development | Tak |
| Rozwój wysokopoziomowy i niskopoziomowy | Tak |
| Dostępy | Modele robota, API, narzędzia deweloperskie, dokumentacja, przykłady |
| Sensory percepcji | Kamera głębi, skaner laserowy 3D |
| Audio | Głośniki stereo, matryca mikrofonów |
| Łączność | Wi-Fi 6, Bluetooth 5.2 |
| Aktualizacje systemu | Smart OTA |
Sprawdź, jak robot Unitree G1 Edu U2 radzi sobie w akcji:
Prezentacja:
Możliwości robota:

Robot humanoidalny UNITREE G1 Edu U8
Kod produktu: 112.085558 21901
EAN: 5907085529837
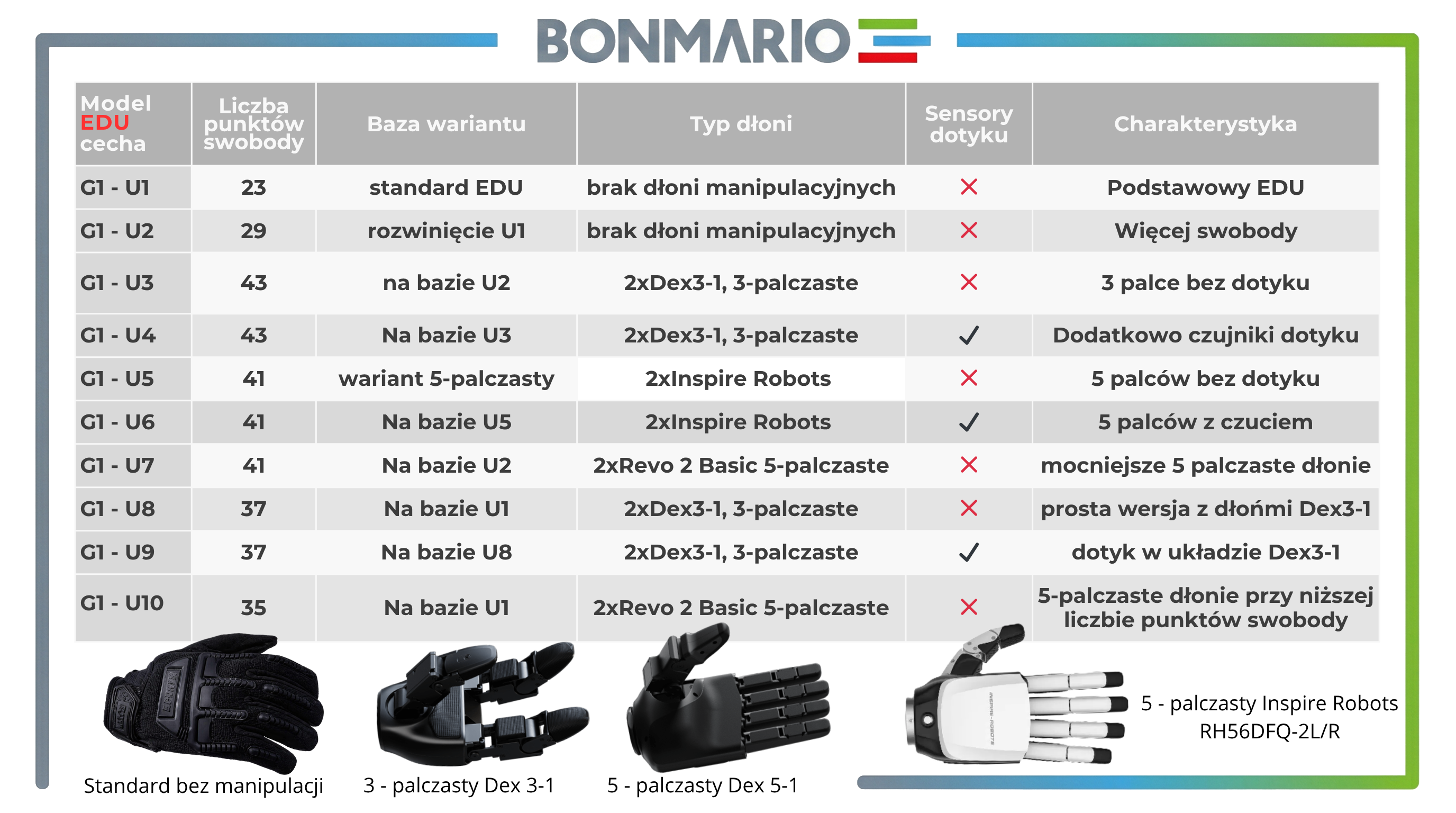
Dostępne warianty










