

Powiązane produkty



Wygląd i konstrukcja
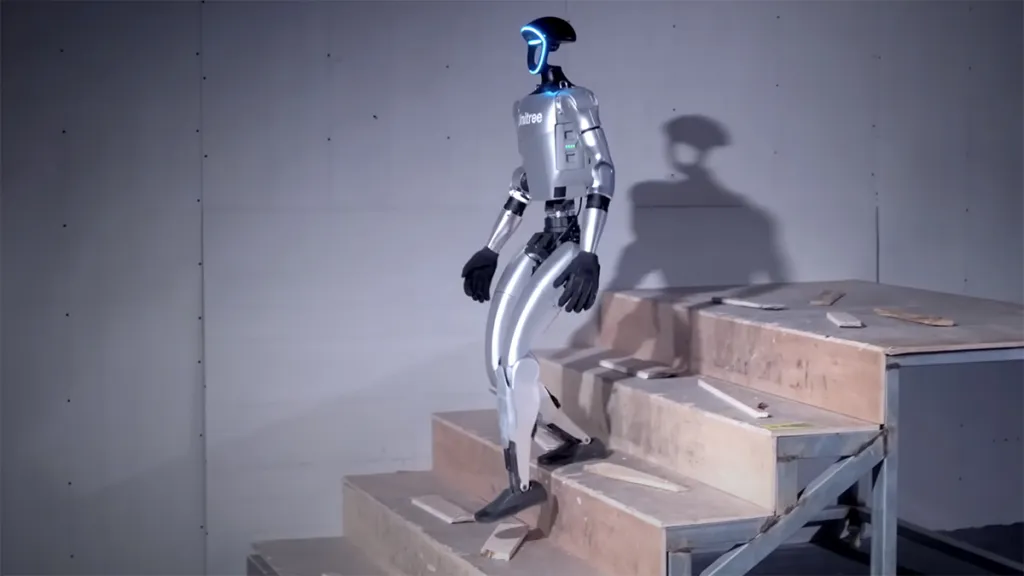
Unitree G1 to humanoidalny robot o wysokości 132 cm i wadze 35 kg, zaprojektowany w nowoczesnym, smukłym stylu. Jego unikalna cecha to możliwość złożenia się do kompaktowych 69 cm wysokości, co znacznie ułatwia transport i przechowywanie.

Mobilność i zakres ruchu
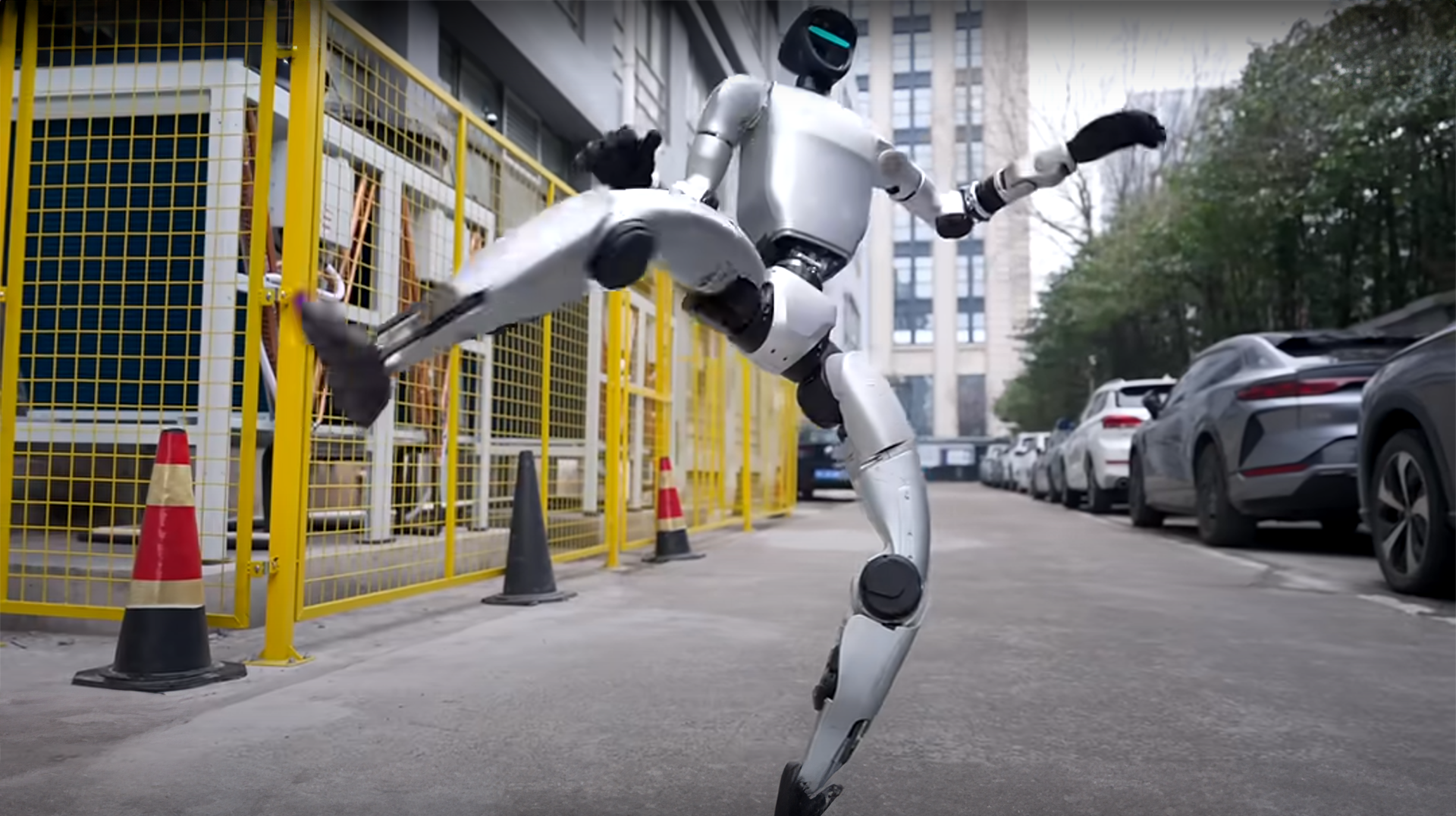
Robot dysponuje 23 stopniami swobody, co pozwala na wykonywanie złożonych i płynnych ruchów. Każda noga ma po 6 DOF, a każde ramię po 5, dzięki czemu G1 porusza się w sposób zbliżony do człowieka.
Moc i udźwig
G1 osiąga imponujący moment obrotowy stawu kolanowego wynoszący 90 N·m, co przekłada się na dużą siłę. Każde ramię jest w stanie udźwignąć do 2 kg, co umożliwia wykonywanie różnorodnych zadań manualnych.

Systemy percepcji
Robot jest wyposażony w kamerę głębi oraz 3D LiDAR, które umożliwiają mu mapowanie otoczenia w czasie rzeczywistym. Dodatkowo posiada system audio z czterema mikrofonami i głośnikiem 5 W do interakcji głosowych.

Jednostka obliczeniowa i zasilanie
Sercem G1 jest 8-rdzeniowy procesor, który zapewnia szybkie i lokalne przetwarzanie danych. Zasilanie zapewnia bateria 9000 mAh o czasie pracy do 2 godzin, z możliwością szybkiej wymiany.

Łączność i oprogramowanie
G1 obsługuje Wi-Fi 6 oraz Bluetooth 5.2, co gwarantuje szybką i stabilną komunikację. Oprogramowanie można aktualizować zdalnie dzięki funkcji OTA (Over-The-Air).
Przeznaczenie
G1 jest projektowany jako fizyczny awatar AI, zdolny do nauki i interakcji w rzeczywistym środowisku. Jego konstrukcja i funkcje czynią go narzędziem dla badań, edukacji oraz rozwoju nowej generacji robotów humanoidalnych.
| Unitree G1 | |
|---|---|
| G1 | |
| Wymiary (stojący) | 1320 × 450 × 200 mm |
| Wymiary (złożony) | 690 × 450 × 300 mm |
| Waga (z baterią) | Około 35 kg |
| Całkowita liczba stopni swobody | 23 |
| Stopnie swobody jednej nogi | 6 |
| Stopnie swobody talii | 1 |
| Stopnie swobody jednego ramienia | 5 |
| Łożyska wyjściowe stawów | Przemysłowe łożyska krzyżowe (wysoka precyzja, duża nośność) |
| Silnik stawu | Silnik synchroniczny z magnesami trwałymi PMSM, niska bezwładność, wysoka prędkość, lepsza reakcja i chłodzenie |
| Maksymalny moment obrotowy stawu kolanowego | 90 N·m |
| Maksymalny udźwig ramienia | Około 2 kg |
| Długość łydka + udo | 0,6 m |
| Rozpiętość ramienia | Około 0,45 m |
| Zakres ruchu stawów | Talia: Z ±155° Kolano: 0°–165° Biodro: P ±154°, R -30°~+170°, Y ±158° |
| Pełne okablowanie wewnętrzne stawów | Tak |
| Enkoder stawu | Podwójny enkoder |
| System chłodzenia | Lokalne chłodzenie powietrzem |
| Zasilanie | Akumulator litowy 13S |
| Moc obliczeniowa | 8-rdzeniowy procesor wysokiej wydajności |
| Czujniki | Kamera głębi + 3D LiDAR |
| Array 4 mikrofonów | Tak |
| Głośnik 5W | Tak |
| Łączność | WiFi 6, Bluetooth 5.2 |
| Pojemność baterii (Quick Release) | 9000 mAh |
| Ładowarka | 54V 5A |
| Kontroler ręczny | Tak |
| Czas pracy na baterii | Około 2 h |
| Aktualizacje OTA | Tak |
| Możliwość programowania | Tak |
| Gwarancja | 8 miesięcy |
Sprawdź, jak robot Unitree G1 Edu U2 radzi sobie w akcji:
Prezentacja:
Możliwości robota:

Robot humanoidalny Unitree G1
Produkt dostępny
Kod produktu: 112.077284 15402
EAN: 5907085525600
Dostępne warianty



