Powiązane produkty


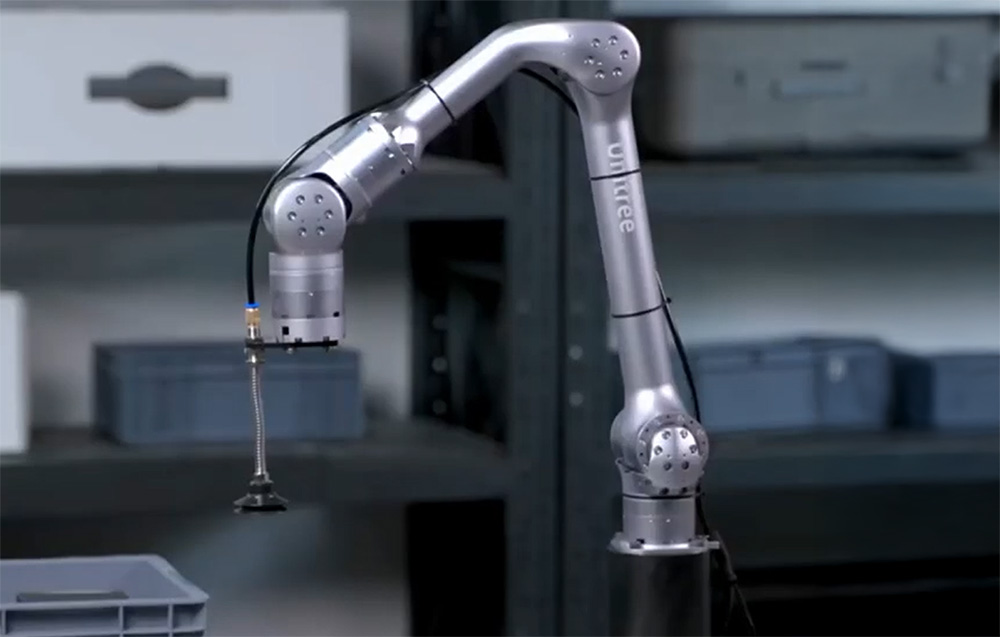
Unitree Z1 PRO: lekkie ramię do precyzyjnej manipulacji w badaniach i przemyśle
Unitree Z1 PRO to robotyczne ramię o zasięgu 740 mm i masie około 4,5 kg, przygotowane do zadań wymagających dokładnego prowadzenia narzędzia w przestrzeni. Konstrukcja oferuje 6 stopni swobody (6 DoF), co daje dużą elastyczność ruchu i pozwala wygodnie pracować w różnych konfiguracjach stanowiska. Powtarzalność na poziomie około 0,1 mm ułatwia realizację operacji, w których liczy się precyzja, a maksymalna prędkość osi do 180°/s sprawia, że ramię pasuje zarówno do szybkich cykli, jak i spokojnych, dokładnych manipulacji.
Kinematyka i zakresy osi: swoboda ruchu w ciasnych strefach roboczych
Każda z sześciu osi Unitree Z1 PRO ma szeroki zakres pracy, dzięki czemu łatwiej realizować złożone trajektorie i omijać przeszkody w ograniczonej przestrzeni. Oś J1 pracuje w zakresie ±150°, J2 od 0 do 180°, J3 od −165° do 0°, J4 ±80°, J5 ±85°, a J6 aż ±160°, co daje elastyczność przy ustawianiu narzędzia pod różnymi kątami. W praktyce najbardziej przydaje się szeroki zakres osi J1 i J6 oraz możliwość precyzyjnego pozycjonowania i omijania przeszkód podczas pracy przy elementach ustawionych blisko siebie.

Udźwig do 3 kg i zastosowania z narzędziami oraz chwytakami
Ramię może pracować z obciążeniem do około 3 kg, co pozwala stosować różne chwytaki, narzędzia i elementy robocze bez ograniczania się do najlżejszych końcówek. Połączenie niskiej masy własnej i sensownego udźwigu ułatwia wdrożenie tam, gdzie liczy się mobilność i szybka integracja. Najważniejsze jest tu udźwig około 3 kg oraz lekka konstrukcja około 4,5 kg, dzięki czemu ramię dobrze pasuje do stanowisk badawczych i platform mobilnych.
Sterowanie siłą, momentem i ochrona pracy kontaktowej
Unitree Z1 PRO wspiera sterowanie pozycją, ale również kontrolę siły i momentu obrotowego, co przydaje się w zadaniach wymagających kontaktu z otoczeniem. Wbudowane wykrywanie kolizji i funkcje force feedback zwiększają bezpieczeństwo i pomagają realizować operacje, w których ważne jest „czucie” oporu, a nie tylko dojazd do punktu. Dodatkowo komunikacja przez Ethernet oraz praca w środowisku Ubuntu ułatwiają stabilne działanie i integrację w istniejących systemach. Kluczowe są tu kontrola siły i momentu z force feedback oraz wykrywanie kolizji zwiększające bezpieczeństwo.
SDK, ROS i symulacja: przygotowane pod rozwój i testowanie algorytmów
Ramię zostało zaprojektowane z myślą o projektach R&D, dlatego oferuje SDK, wsparcie dla ROS oraz możliwość pracy w środowiskach symulacyjnych, na przykład w Gazebo. To zaplecze ułatwia planowanie ruchu, testowanie algorytmów i integrację z systemami wizyjnymi albo robotami mobilnymi. W praktyce liczy się dostępność SDK i ROS oraz możliwość przenoszenia pomysłów z symulacji do realnego stanowiska bez budowania wszystkiego od zera.

Chwytak Unitree Z1: dedykowane zakończenie do precyzyjnego chwytu
Chwytak Z1 to dedykowany gripper dla ramienia Unitree Z1, zaprojektowany do precyzyjnego chwytania obiektów o różnych kształtach i rozmiarach. Ma lekką, a jednocześnie wytrzymałą konstrukcję, dzięki czemu nie obciąża niepotrzebnie ramienia, a jednocześnie zapewnia stabilny, adaptowalny uścisk. To akcesorium, które domyka całość, bo zamienia ramię w kompletne narzędzie do fizycznej interakcji ze światem i realizacji bardziej złożonych zadań manipulacyjnych, oferując dopasowany, adaptacyjny chwyt oraz optymalizację pod niskie obciążenie ramienia.
| Unitree Z1 PRO | |
|---|---|
| Producent | Unitree |
| Model | Z1 PRO |
| Liczba osi | 6 DoF |
| Zasięg | 740 mm |
| Masa ramienia | Ok. 4,5 kg |
| Powtarzalność | Ok. 0,1 mm |
| Zakres osi J1 | ±150° |
| Zakres osi J2 | Od 0° do 180° |
| Zakres osi J3 | Od −165° do 0° |
| Zakres osi J4 | ±80° |
| Zakres osi J5 | ±85° |
| Zakres osi J6 | ±160° |
| Maksymalna prędkość osi | Do 180°/s |
| Udźwig | ≥ 3 kg |
| Napięcie zasilania | 24 V |
| Prąd | > 20 A |
| Moc maksymalna | 500 W |
| Interfejs komunikacyjny | Ethernet |
| System użytkownika | Ubuntu |
| Tryby sterowania | Pozycja + kontrola siły/torque (feedback: moment/kąt/prędkość) |
| Funkcje bezpieczeństwa | Wykrywanie kolizji, force feedback |
| Integracje | SDK, ROS, symulacja (np. Gazebo) |

Robotyczne ramię UNITREE Z1 Pro i chwytak UNITREE Z1


