

Powiązane produkty





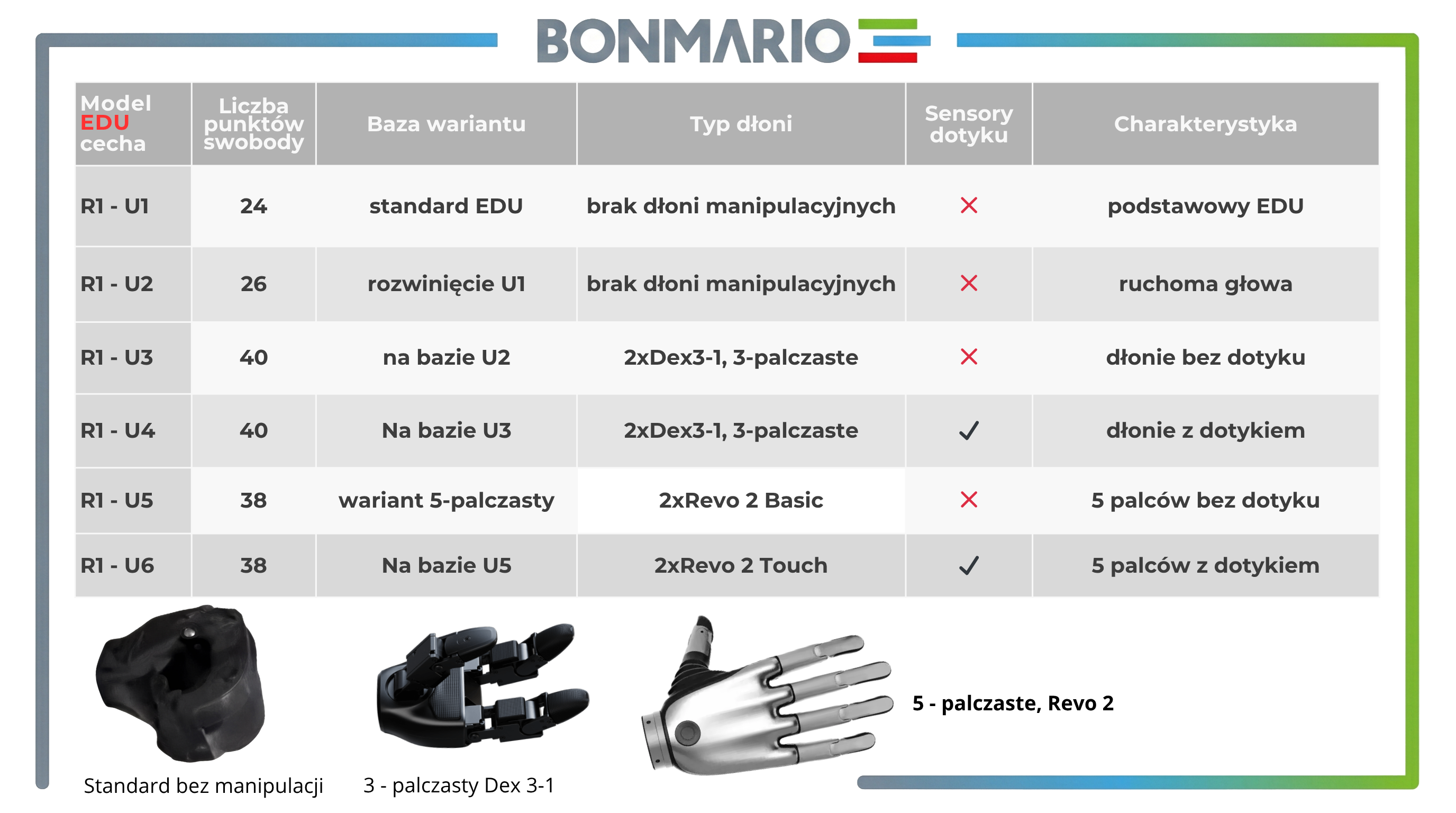
Unitree R1 EDU U6 - platforma R&D z dłońmi Revo 2 Touch i pełną haptyką
Unitree R1 Edu U6 to zaawansowany robot humanoidalny zaprojektowany jako kompletna platforma badawczo-rozwojowa do projektów z robotyki i AI. Konstrukcja o wysokości 1210 mm i masie około 25 kg łączy mobilność oraz precyzję z kompaktową formą, która ułatwia transport i szybkie wdrożenie w laboratorium. Wersja EDU U6 rozwija funkcje R1 Basic i EDU U1, dodając mocniejsze zaplecze obliczeniowe z 100 TOPS, wsparcie algorytmów AI, dodatkowe stopnie swobody głowy oraz dwie pięciopalczaste dłonie Revo 2 Touch z pełnym wsparciem haptycznym, co przekłada się na jeszcze lepsze warunki do eksperymentów, symulacji i testów w świecie rzeczywistym.

Kinematyka 38 DoF - ruch płynny, dynamiczny i realistyczny
Robot oferuje łącznie 38 stopni swobody, co pozwala tworzyć złożone i naturalnie wyglądające sekwencje ruchu całego ciała. Unitree R1 Edu U6 potrafi skakać, biegać, chodzić na rękach i wykonywać układy inspirowane sztukami walki, dzięki czemu świetnie nadaje się do badań nad lokomocją oraz równowagą w dynamicznych scenariuszach. Każda noga pracuje w 6 DoF, talia w 2 DoF, każde ramię w 5 DoF, głowa w 2 DoF, a dodatkowo robot ma dwie dłonie po 6 DoF, co ułatwia łączenie badań nad ruchem z precyzyjną manipulacją.

Przeguby i mechanika przygotowane na intensywne testy
W R1 EDU U6 zastosowano dopracowaną konstrukcję przegubów z wewnętrznym prowadzeniem przewodów w pustych osiach, co ogranicza ryzyko uszkodzeń i poprawia niezawodność podczas wielu powtórzeń. Za precyzję odczytu odpowiadają podwójne i pojedyncze enkodery, a lokalne chłodzenie powietrzem stabilizuje parametry pracy w długich sesjach badawczych. Dodatkowo maksymalny udźwig ramienia na poziomie 2 kg pozwala prowadzić praktyczne eksperymenty z chwytaniem, podawaniem i przenoszeniem obiektów.

Dłonie Revo 2 Touch - pięć palców i czucie dotyku w zadaniach manipulacyjnych
Wariant EDU U6 otrzymuje dwie pięciopalczaste dłonie Revo 2 Touch z pełnym wsparciem dotykowym, co rozszerza możliwości pracy w zadaniach wymagających zręczności. Każda dłoń ma 6 stopni swobody, a zaawansowana haptyka ułatwia kontrolę chwytu, precyzyjne operowanie przedmiotami oraz testowanie scenariuszy, w których liczy się kontakt z otoczeniem. To szczególnie ważne w projektach z zakresu manipulacji, uczenia przez demonstrację i interakcji człowiek-robot.

100 TOPS i ekosystem deweloperski - gotowość na AI, SLAM i percepcję
EDU U6 wykorzystuje dock rozszerzeń oferujący 100 TOPS mocy obliczeniowej, dzięki czemu platforma dobrze sprawdza się w pracy nad algorytmami AI, uczeniem maszynowym i przetwarzaniem danych sensorycznych. Użytkownik otrzymuje dostęp do modeli robota, API i narzędzi deweloperskich, a kompatybilność z środowiskami symulacyjnymi, w tym Isaac SIM, ułatwia płynne przejście od symulacji do realnych testów bez przebudowy całego procesu.

Percepcja, łączność i przygotowanie do pracy w laboratorium
Robot jest wyposażony w kamerę binokularną, która stanowi bazę do projektów z percepcją i algorytmami wizyjnymi. Wbudowany głośnik oraz matryca mikrofonów wspierają komunikację głosową, a Wi-Fi 6 i Bluetooth 5.2 zapewniają stabilną łączność i szybki transfer danych. Inteligentny akumulator litowy z szybkim montażem oferuje około 1 godziny pracy, a dołączona ładowarka ułatwia szybkie przywrócenie robota do kolejnych zadań i testów.

W zestawie otrzymujesz:
- Robot humanoidalny Unitree R1 Edu U6
- Pilot zdalnego sterowania
- Ładowarka
- Walizka transportowa robota
| Robot humanoidalny UNITREE R1 Edu U6 | |
|---|---|
| Producent | Unitree |
| Model | R1 EDU U6 |
| Wymiary (pozycja stojąca) | 1210 × 357 × 190 mm |
| Masa (z akumulatorem) | Ok. 25 kg |
| Łączna liczba stopni swobody | 38 DoF |
| Stopnie swobody nóg | 6 DoF na nogę |
| Stopnie swobody talii | 2 DoF |
| Stopnie swobody ramion | 5 DoF na ramię |
| Stopnie swobody głowy | 2 DoF |
| Stopnie swobody dłoni | 6 DoF na dłoń |
| Zakres ruchu przegubów w pasie | Yaw: ±150° Roll: ±30° |
| Zakres ruchu przegubów w biodrze | Yaw: ±157° Pitch: od –168° do 146° Roll: od –60° do 100° |
| Zakres ruchu przegubów w kolanie | Od -10° do 148° |
| Konstrukcja przegubów | Wewnętrzne prowadzenie przewodów w pustych osiach |
| Enkodery | Podwójny + pojedynczy enkoder |
| Chłodzenie | Lokalne chłodzenie powietrzem |
| Maksymalny udźwig ramienia | 2 kg |
| Długość uda + podudzia | 0,675 m |
| Rozpiętość ramion | Ok. 0,435 m |
| Zasilanie | Akumulator litowy |
| Czas pracy | Ok. 1 h |
| Dock rozszerzeń – moc obliczeniowa | 100 TOPS |
| Sensor percepcji | Antropomorficzna kamera binokularna (dwuoczna) |
| Audio | Głośnik, matryca mikrofonów |
| Łączność | Wi-Fi 6, Bluetooth 5.2 |

Robot humanoidalny UNITREE R1 Edu U6 Crismon Hero
Kod produktu: 112.081101 21900
EAN: 5907085529967


