

Powiązane produkty





Unitree R1 EDU U4 - platforma R&D z haptyką i zręczną manipulacją
Unitree R1 EDU U4 to zaawansowany robot humanoidalny zaprojektowany jako kompletna platforma badawczo-rozwojowa do pracy z robotyką i sztuczną inteligencją. Jego konstrukcja ma około 1210 mm wysokości i waży około 25 kg, a przy tym oferuje aż 40 stopni swobody oraz bardzo wysoką mobilność w kompaktowej formie, którą łatwo przenosić między stanowiskami. Wersja EDU U4 rozwija możliwości R1 Basic i EDU U1, dodając dwie dłonie Dex3-1 z kontrolą siły i czuciem dotyku, mocniejsze zasoby obliczeniowe pod AI oraz dodatkowe stopnie swobody głowy, co przekłada się na większą swobodę eksperymentów i testów w realnym środowisku.

Zwinny ruch i 40 DoF do dynamicznych scenariuszy lokomocji
Robot oferuje łącznie 40 stopni swobody, co pozwala uzyskać naturalne, płynne i złożone sekwencje ruchu całego ciała. Unitree R1 EDU U4 potrafi skakać, biegać, chodzić na rękach oraz wykonywać układy inspirowane sztukami walki, a szerokie zakresy przegubów ułatwiają badania nad stabilnością i równowagą. Układ DoF obejmuje nogi (po 6 DoF), talię (2 DoF), ramiona (po 5 DoF), głowę (2 DoF) oraz dwie dłonie po 7 DoF, dzięki czemu platforma dobrze nadaje się do testów łączących lokomocję z manipulacją.

Konstrukcja przegubów przygotowana na długie sesje w laboratorium
W R1 EDU U4 zastosowano rozwiązania nastawione na trwałość i powtarzalność pomiarów w czasie intensywnej eksploatacji. Wewnętrzne prowadzenie przewodów w pustych osiach zwiększa niezawodność mechaniki, a zestaw podwójnych i pojedynczych enkoderów zapewnia dokładniejszy odczyt pozycji w całym zakresie ruchu. Lokalnie realizowane chłodzenie powietrzem pomaga utrzymać stabilne parametry pracy przy długich testach, a udźwig ramienia do 2 kg umożliwia praktyczne eksperymenty z chwytaniem i przenoszeniem obiektów.

Dex3-1 z haptyką: kontrola siły i czucie dotyku w dłoniach
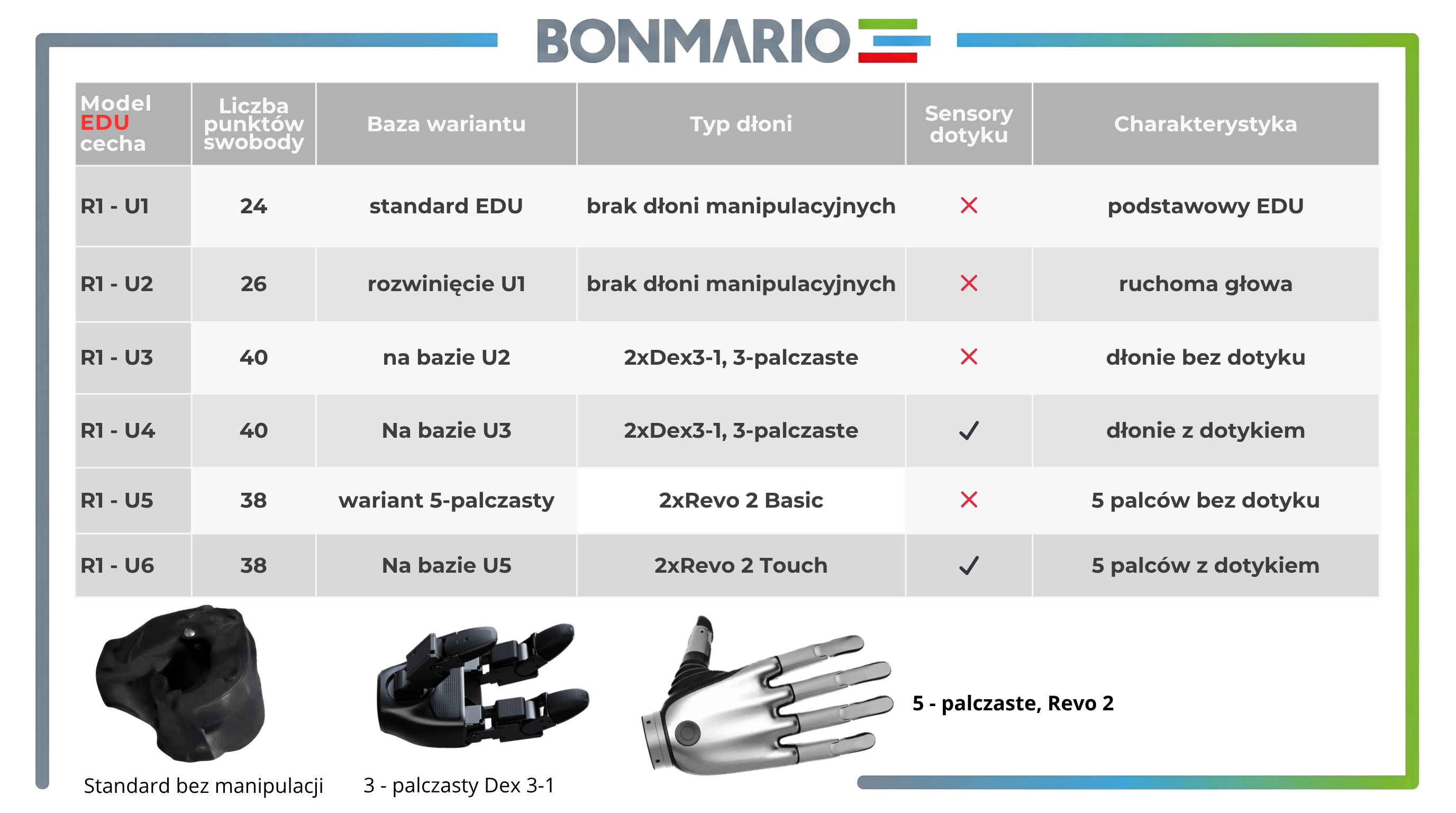
Najważniejszym wyróżnikiem EDU U4 są dwie dłonie trójpalczaste Dex3-1 z sensorami dotyku oraz kontrolą siły, co otwiera drogę do bardziej realistycznych zadań manipulacyjnych i badań HRI. Każda dłoń ma 7 DoF: kciuk 3 DoF, palec wskazujący 2 DoF i palec środkowy 2 DoF, dzięki czemu robot może precyzyjniej chwytać i operować przedmiotami. W praktyce haptyka ułatwia pracę z obiektami o różnych fakturach i kształtach, bo manipulacja nie opiera się wyłącznie na pozycji, ale też na informacji dotykowej i sile chwytu.

100 TOPS i środowiska symulacyjne - gotowy fundament pod AI
Wersja EDU U4 wprowadza dock rozszerzeń oferujący do 100 TOPS mocy obliczeniowej, dzięki czemu platforma jest przygotowana do intensywnego rozwoju algorytmów AI, percepcji i uczenia maszynowego. Dostęp do modeli robota, API oraz narzędzi deweloperskich pozwala rozwijać rozwiązania na różnych poziomach, a kompatybilność z popularnymi środowiskami symulacyjnymi, w tym Isaac SIM, ułatwia przejście od symulacji do testów na fizycznym robocie bez przebudowy całego pipeline’u.
Percepcja, komunikacja i komplet do pracy badawczej
Robot korzysta z kamery binokularnej jako podstawy do algorytmów wizyjnych i orientacji w przestrzeni, a wbudowany głośnik i matryca mikrofonów wspierają naturalniejszą komunikację głosową w projektach interakcji człowiek–robot. Łączność Wi-Fi 6 i Bluetooth 5.2 zapewnia stabilną transmisję danych, a inteligentny akumulator litowy z szybkim montażem daje około 1 godziny pracy i pozwala sprawnie przygotować robota do kolejnej sesji. Całość uzupełnia ekosystem wdrożeniowy i wsparcie, dzięki którym platforma dobrze odnajduje się w laboratoriach, na uczelniach i w zespołach R&D.

W zestawie otrzymujesz:
- Robot humanoidalny Unitree R1 Edu U4
- Pilot zdalnego sterowania
- Ładowarka
- Walizka transportowa robota
| Robot humanoidalny UNITREE R1 Edu U4 | |
|---|---|
| Producent | Unitree |
| Model | R1 EDU U4 |
| Wymiary (pozycja stojąca) | 1210 × 357 × 190 mm |
| Masa (z akumulatorem) | Ok. 25 kg |
| Łączna liczba stopni swobody | 40 DoF |
| Stopnie swobody nóg | 6 DoF na nogę |
| Stopnie swobody talii | 2 DoF |
| Stopnie swobody ramion | 5 DoF na ramię |
| Stopnie swobody głowy | 2 DoF |
| Stopnie swobody dłoni | 7 DoF na dłoń (kciuk: 3 DoF, palec wskazujący: 2 DoF, palec środkowy: 2 DoF) |
| Zakres ruchu przegubów w pasie | Yaw: ±150° Roll: ±30° |
| Zakres ruchu przegubów w biodrze | Yaw: ±157° Pitch: od –168° do 146° Roll: od –60° do 100° |
| Zakres ruchu przegubów w kolanie | Od -10° do 148° |
| Konstrukcja przegubów | Wewnętrzne prowadzenie przewodów w pustych osiach |
| Enkodery | Podwójny + pojedynczy enkoder |
| Chłodzenie | Lokalne chłodzenie powietrzem |
| Maksymalny udźwig ramienia | 2 kg |
| Długość uda + podudzia | 0,675 m |
| Rozpiętość ramion | Ok. 0,435 m |
| Zasilanie | Akumulator litowy |
| Czas pracy | Ok. 1 h |
| Dock rozszerzeń – moc obliczeniowa | 100 TOPS |
| Sensor percepcji | Antropomorficzna kamera binokularna (dwuoczna) |
| Audio | Głośnik, matryca mikrofonów |
| Łączność | Wi-Fi 6, Bluetooth 5.2 |

Robot humanoidalny UNITREE R1 Edu U4 Crismon Hero
Kod produktu: 112.081099 21898
EAN: 5907085529943


