

Powiązane produkty





Unitree R1 EDU U5 - platforma R&D z 5-palczastymi dłońmi Revo 2 Basic
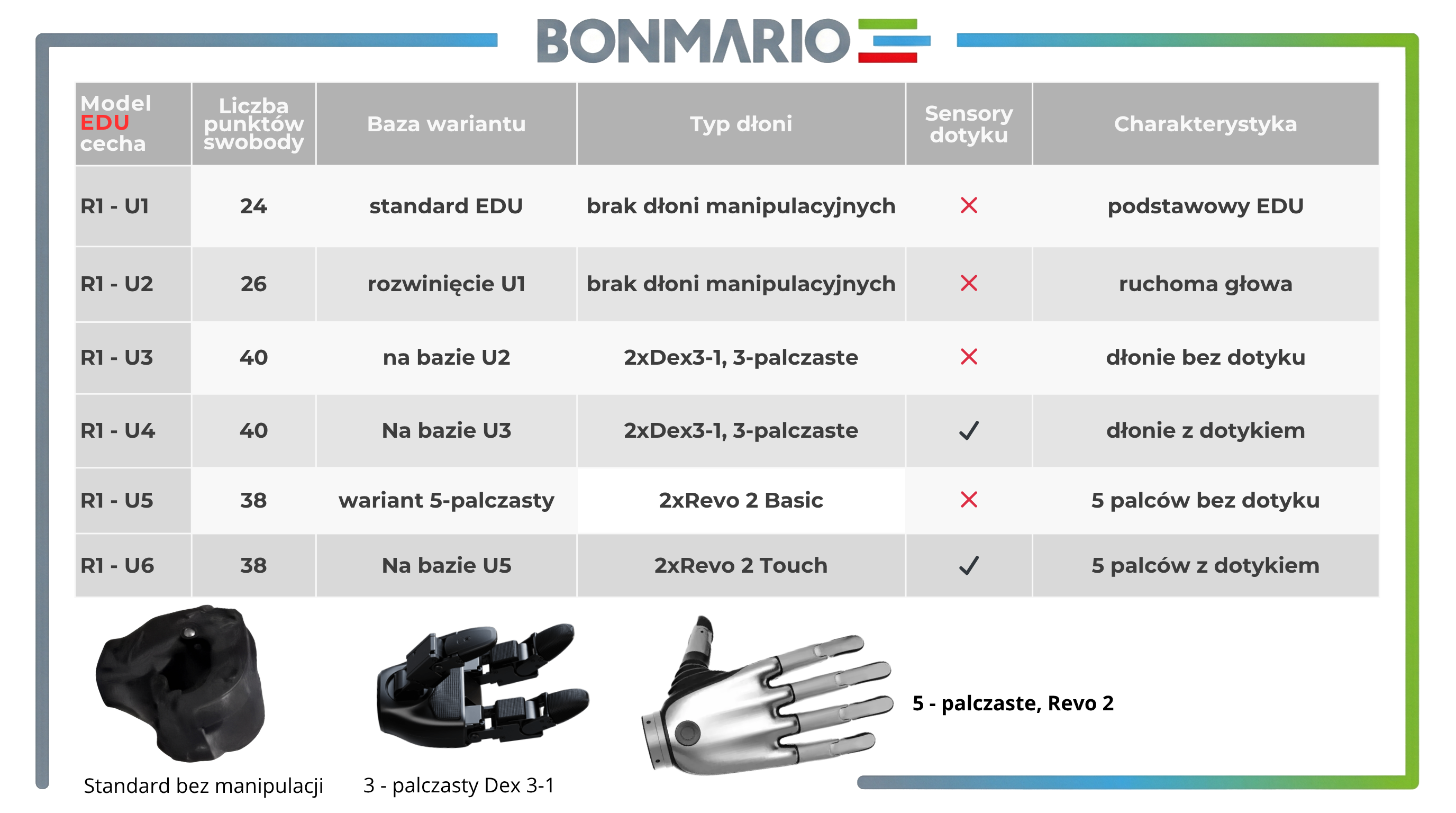
Unitree R1 EDU U5 to zaawansowany robot humanoidalny stworzony jako kompletna platforma badawczo-rozwojowa do projektów z robotyki i sztucznej inteligencji. Konstrukcja o wysokości około 1210 mm i masie około 25 kg łączy kompaktową formę łatwą do przenoszenia z bardzo wysoką mobilnością oraz precyzją ruchu. Wariant EDU U5 rozwija możliwości R1 Basic i EDU U1, dodając 38 stopni swobody, mocniejsze zaplecze pod algorytmy AI, dwie pięciopalczaste dłonie Revo 2 Basic oraz dodatkowe stopnie swobody głowy, dzięki czemu sprawdza się w zaawansowanych eksperymentach, symulacjach i testach w środowisku rzeczywistym.

Ruch i kinematyka 38 DoF do dynamicznych testów
Robot oferuje łącznie 38 stopni swobody, co pozwala uzyskać realistyczne, płynne i złożone sekwencje ruchu całego ciała. Unitree R1 EDU U5 potrafi skakać, biegać, chodzić na rękach oraz wykonywać układy inspirowane sztukami walki, co ułatwia badania nad lokomocją i stabilizacją w dynamicznych scenariuszach. Rozkład DoF obejmuje nogi (po 6 DoF), talię (2 DoF), ramiona (po 5 DoF), głowę (2 DoF) oraz dwie dłonie po 6 DoF, co pozwala łączyć testy ruchu z manipulacją.

Przeguby zaprojektowane pod intensywną eksploatację
W R1 EDU U5 zastosowano dopracowaną konstrukcję przegubów z wewnętrznym prowadzeniem przewodów w pustych osiach, co ogranicza ryzyko uszkodzeń mechanicznych podczas częstych powtórzeń testów. Za dokładność odczytu odpowiadają podwójne i pojedyncze enkodery, a lokalne chłodzenie powietrzem pomaga utrzymać stabilne parametry pracy w długich sesjach laboratoryjnych. Dodatkowo maksymalny udźwig ramienia na poziomie około 2 kg pozwala prowadzić praktyczne eksperymenty z chwytaniem i przenoszeniem obiektów.

Pięciopalczaste dłonie Revo 2 Basic do precyzyjnej manipulacji
Wersja EDU U5 została wyposażona w dwie zręczne dłonie pięciopalczaste Revo 2 Basic, które rozszerzają możliwości pracy z obiektami i narzędziami w porównaniu do prostszych konfiguracji. Każda dłoń ma 6 stopni swobody, co wspiera zadania wymagające bardziej naturalnego chwytu, zmiany ułożenia przedmiotu i kontrolowanej interakcji w przestrzeni. To praktyczne rozwiązanie do badań nad manipulacją, planowaniem ruchu kończyn i koordynacją pracy całego ciała.

100 TOPS i narzędzia pod AI, od symulacji do realnych testów
EDU U5 wykorzystuje dock rozszerzeń oferujący do 100 TOPS mocy obliczeniowej, co ułatwia rozwój algorytmów AI, uczenia maszynowego i percepcji w wymagających projektach. Platforma zapewnia dostęp do modeli robota, API oraz narzędzi deweloperskich, a kompatybilność z popularnymi środowiskami symulacyjnymi, w tym Isaac SIM, pozwala sprawnie przenosić rozwiązania z symulacji do świata rzeczywistego bez przebudowy całego workflow.

Percepcja, łączność i kompletne przygotowanie do pracy badawczej
Robot korzysta z kamery binokularnej jako podstawy do zadań wizyjnych i orientacji w otoczeniu, a wbudowany głośnik i matryca mikrofonów wspierają komunikację głosową w projektach HRI. Łączność Wi-Fi 6 i Bluetooth 5.2 zapewnia stabilną transmisję danych, a inteligentny akumulator litowy z szybkim montażem daje około 1 godziny pracy i ułatwia szybkie rotowanie sprzętu między zadaniami. Całość uzupełnia wsparcie ekosystemowe, dzięki któremu platforma dobrze sprawdza się w laboratoriach, na uczelniach oraz w zespołach R&D.

W zestawie otrzymujesz:
- Robot humanoidalny Unitree R1 Edu U5
- Pilot zdalnego sterowania
- Ładowarka
- Walizka transportowa robota
| Robot humanoidalny UNITREE R1 Edu U5 | |
|---|---|
| Producent | Unitree |
| Model | R1 EDU U5 |
| Wymiary (pozycja stojąca) | 1210 × 357 × 190 mm |
| Masa (z akumulatorem) | Ok. 25 kg |
| Łączna liczba stopni swobody | 38 DoF |
| Stopnie swobody nóg | 6 DoF na nogę |
| Stopnie swobody talii | 2 DoF |
| Stopnie swobody ramion | 5 DoF na ramię |
| Stopnie swobody głowy | 2 DoF |
| Stopnie swobody dłoni | 6 DoF na dłoń |
| Zakres ruchu przegubów w pasie | Yaw: ±150° Roll: ±30° |
| Zakres ruchu przegubów w biodrze | Yaw: ±157° Pitch: od –168° do 146° Roll: od –60° do 100° |
| Zakres ruchu przegubów w kolanie | Od -10° do 148° |
| Konstrukcja przegubów | Wewnętrzne prowadzenie przewodów w pustych osiach |
| Enkodery | Podwójny + pojedynczy enkoder |
| Chłodzenie | Lokalne chłodzenie powietrzem |
| Maksymalny udźwig ramienia | 2 kg |
| Długość uda + podudzia | 0,675 m |
| Rozpiętość ramion | Ok. 0,435 m |
| Zasilanie | Akumulator litowy |
| Czas pracy | Ok. 1 h |
| Dock rozszerzeń – moc obliczeniowa | 100 TOPS |
| Sensor percepcji | Antropomorficzna kamera binokularna (dwuoczna) |
| Audio | Głośnik, matryca mikrofonów |
| Łączność | Wi-Fi 6, Bluetooth 5.2 |

Robot humanoidalny UNITREE R1 Edu U5 Crismon Hero
Kod produktu: 112.081100 21899
EAN: 5907085529950


