Powiązane produkty


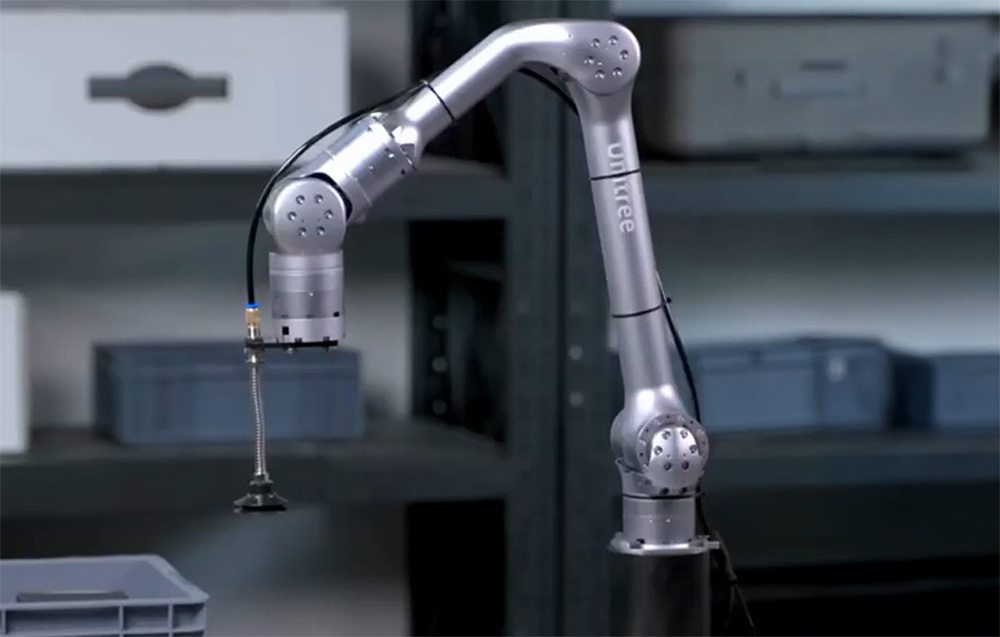
Unitree Z1 PRO - ramię do precyzyjnej manipulacji
Unitree Z1 PRO to kompaktowe ramię robotyczne stworzone do zadań badawczych, edukacyjnych i przemysłowych, w których liczy się dokładność oraz powtarzalność. Przy zasięgu 740 mm i masie około 4,5 kg oferuje 6 stopni swobody, co ułatwia pracę w przestrzeni roboczej i wykonywanie złożonych ruchów. Powtarzalność na poziomie około 0,1 mm wspiera zadania wymagające wysokiej precyzji, a prędkość osi do 180°/s pozwala zachować dynamikę tam, gdzie trzeba działać szybko, ale bez utraty kontroli.
Zakresy osi i ruch, który daje swobodę
Każda z sześciu osi ma szeroki zakres pracy, dzięki czemu końcówkę roboczą można ustawiać w wielu pozycjach i wygodnie omijać przeszkody w ciasnych stanowiskach. Oś J1 pracuje w zakresie ±150°, J2 od 0 do 180°, J3 od −165° do 0°, J4 ±80°, J5 ±85°, a J6 aż ±160°. Taka kinematyka ułatwia dokładne pozycjonowanie narzędzia i płynne prowadzenie ruchu w scenariuszach, gdzie precyzyjne ustawienie orientacji ma kluczowe znaczenie, a szerokie zakresy obrotu realnie przekładają się na większą użyteczność ramienia.

Udźwig i praktyczne możliwości pracy z osprzętem
Ramię może obsługiwać obciążenia na poziomie około 3 kg, co pozwala stosować różne chwytaki, narzędzia i elementy robocze bez ograniczania typowych zastosowań. Dzięki połączeniu mobilnej konstrukcji z sensownym udźwigiem Unitree Z1 PRO sprawdza się w miejscach, gdzie ważna jest szybka integracja, łatwy montaż i praca na stanowiskach testowych lub platformach mobilnych. W praktyce zyskujesz udźwig około 3 kg przy zachowaniu łatwej adaptacji do różnych zastosowań.
Sterowanie, kontrola siły i funkcje ochronne
Unitree Z1 PRO wspiera sterowanie pozycją, a także pracę w trybach związanych z siłą i momentem obrotowym, co jest szczególnie istotne w zadaniach wymagających kontaktu z otoczeniem. Wbudowane rozwiązania bezpieczeństwa, takie jak wykrywanie kolizji i force feedback, pomagają ograniczyć ryzyko uszkodzeń i poprawiają przewidywalność działania w dynamicznych scenariuszach. Dodatkowo komunikacja przez Ethernet i praca w środowisku Ubuntu ułatwiają wdrożenie w istniejących systemach. Największą wartość daje tu sterowanie pozycją oraz siłą i momentem oraz wykrywanie kolizji i force feedback.
Narzędzia dla deweloperów i integracja z ekosystemem robotyki
Ramię przygotowano z myślą o projektach R&D, dlatego wspiera środowiska deweloperskie oraz symulację, co przyspiesza testowanie i rozwój algorytmów. Dostępność SDK, wsparcie dla ROS oraz możliwość pracy w narzędziach takich jak Gazebo ułatwiają planowanie ruchu, eksperymenty z manipulacją i integrację z systemami wizyjnymi lub robotami mobilnymi. To podejście sprawia, że łatwiej przejść od prototypu do działającego rozwiązania, a cały proces wdrożenia jest bardziej przewidywalny. W codziennej pracy liczy się tu dostępność SDK oraz wsparcie dla ROS i środowisk symulacyjnych.

| Robotyczne ramię UNITREE Z1 Pro | |
|---|---|
| Producent | Unitree |
| Model | Z1 PRO |
| Liczba osi | 6 DoF |
| Zasięg | 740 mm |
| Masa ramienia | Ok. 4,5 kg |
| Powtarzalność | Ok. 0,1 mm |
| Zakres osi J1 | ±150° |
| Zakres osi J2 | Od 0° do 180° |
| Zakres osi J3 | Od −165° do 0° |
| Zakres osi J4 | ±80° |
| Zakres osi J5 | ±85° |
| Zakres osi J6 | ±160° |
| Maksymalna prędkość osi | Do 180°/s |
| Udźwig | ≥ 3 kg |
| Napięcie zasilania | 24 V |
| Prąd | > 20 A |
| Moc maksymalna | 500 W |
| Interfejs komunikacyjny | Ethernet |
| System użytkownika | Ubuntu |
| Tryby sterowania | Pozycja + kontrola siły/torque (feedback: moment/kąt/prędkość) |
| Funkcje bezpieczeństwa | Wykrywanie kolizji, force feedback |
| Integracje | SDK, ROS, symulacja (np. Gazebo) |

Robotyczne ramię UNITREE Z1 Pro
Produkt dostępny
Kod produktu: 112.078499 21891
EAN: 5907085526904


