

Powiązane produkty


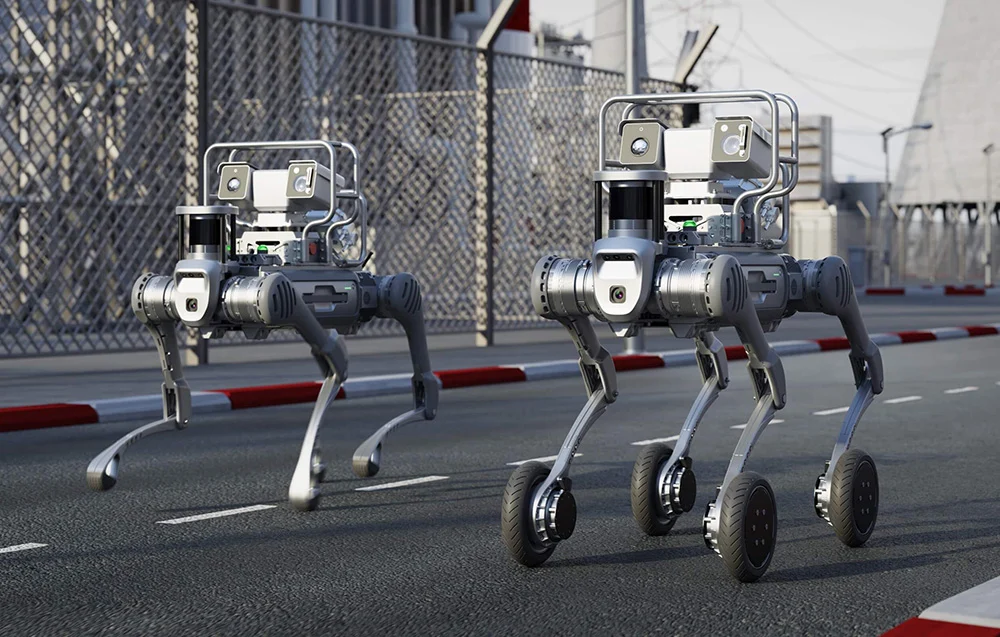
Robot czworonożny UNITREE B2-W z LiDAR
Unitree B2-W z wbudowanym LiDARem to hybrydowa platforma mobilna klasy profesjonalnej, stworzona do pracy w trudnym terenie i środowiskach przemysłowych, gdzie liczy się stabilność, nośność i autonomia. Robot łączy układ kołowo-nożny z rozbudowaną percepcją i zapasem mocy obliczeniowej, oferując udźwig w ruchu około 40 kg oraz zasięg do 25 km przy pełnym obciążeniu. Konstrukcja o masie około 75 kg, klasa szczelności IP67 i praca w zakresie od -20°C do 55°C sprawiają, że to sprzęt przygotowany na realne warunki, a nie tylko testy laboratoryjne.

Hybrydowa mobilność, która nie wybiera nawierzchni
B2-W potrafi działać w trzech trybach: kołowym, kroczącym oraz mieszanym, więc dopasowuje się do sytuacji zamiast wymuszać kompromisy. W praktyce robot pewnie radzi sobie ze schodami o wysokości stopnia około 16 cm, wzniesieniami do 45° i nieregularnym podłożem, takim jak żwir, kamienie czy trawa, utrzymując stabilny ruch dzięki amortyzowanym kołom 225 mm oraz wysoki moment obrotowy kół na poziomie 50 N.m.

Transport ładunku i zasięg w pracy operacyjnej
Platforma została dopracowana pod logistykę w ruchu, dlatego nie chodzi tylko o sam udźwig, ale też o kontrolę trakcji i „ciąg” przy ruszaniu z obciążeniem. Robot oferuje około 40 kg udźwigu roboczego, a przy tym osiąga do 25 km z takim ładunkiem lub około 30 km bez obciążenia, korzystając z akumulatora 45 Ah (2250 Wh), co przekłada się na długi czas działania w terenie i maksymalną siłę poziomego uciągu do 100 kg. Dodatkowym atutem jest gotowość do pracy ze stacjami dokującymi, co ułatwia budowę scenariuszy półautonomicznych i w pełni autonomicznych.

Percepcja 3D: LiDAR wbudowany w platformę
Wersja z LiDARem bazuje na 32-liniowym skanerze 3D klasy automotive, dzięki czemu robot może precyzyjnie wykrywać przeszkody, budować mapę otoczenia i prowadzić unikanie kolizji w ruchu. System percepcji uzupełniają kamery głębi i kamery HD, więc platforma potrafi „widzieć” zarówno w przestrzeniach zamkniętych, jak i na zewnątrz, a wbudowane algorytmy lokalizacji i nawigacji wspierają autonomiczne poruszanie się. Całość domyka SDK do rozwoju i integracji oraz zestaw sensorów pozwalający pracować na danych 3D i wideo równolegle.

Zaplecze obliczeniowe pod AI, SLAM i algorytmy nawigacji
B2-W jest przygotowany do projektów, w których obliczenia dzieją się na robocie, a nie „gdzieś w chmurze”, dlatego w standardzie wykorzystuje procesory Intel Core i5 do funkcji systemowych i Intel Core i7 do rozwoju użytkownika. Dla bardziej wymagających wdrożeń dostępna jest opcja z Intel Core i7 oraz NVIDIA Jetson Orin NX, co pozwala pracować równolegle na kilku jednostkach obliczeniowych i rozdzielać zadania między percepcję, planowanie ruchu i logikę misji. To podejście daje większy zapas mocy dla modeli AI oraz spójne środowisko do implementacji SLAM i fuzji danych z czujników.

Scenariusze profesjonalne i projekty R&D
Połączenie mobilności hybrydowej, nośności i percepcji 3D sprawia, że B2-W z LiDARem pasuje do zadań, w których klasyczne platformy kołowe kończą się na krawężniku, schodach albo luźnym podłożu. W praktyce robot sprawdza się w autonomicznej logistyce, transporcie ładunków w magazynach i zakładach, inspekcjach infrastruktury oraz zastosowaniach public safety, a jednocześnie pozostaje elastyczną platformą dla laboratoriów i zespołów rozwojowych. Kluczowe jest tu to, że dostajesz platformę gotową do pracy w terenie oraz narzędzie, które da się realnie rozwijać przez SDK i integracje.
W zestawie otrzymujesz:
- Unitree B2-W z wbudowanym LiDARem
- SDK do rozwoju i integracji
| Robot czworonożny UNITREE B2-W z LiDAR | |
|---|---|
| Producent | Unitree |
| Model | B2-W z LiDARem |
| Masa (z akumulatorem) | Ok. 75 kg |
| Wymiary (pozycja stojąca) | Ok. 1098 × 450 × 745 mm |
| Układ jezdny | 4 amortyzowane koła o wysokiej niezawodności |
| Udźwig podczas ruchu | ≥ 40 kg |
| Pokonywanie schodów | Wysokość stopnia ok. 16 cm |
| Prędkość maksymalna | Do 5 m/s |
| Kąt pokonywania wzniesień | > 45° |
| Stopień ochrony | IP67 |
| Zakres temperatur pracy | Od –20°C do 55°C |
| Akumulator | 2 kWh, napięcie 58 V |
| Zasięg z ładunkiem 40 kg | Do 25 km |
| Zasięg bez ładunku | Ok. 30 km |
| Ładowanie | Zintegrowane elektrody, gotowość do pracy ze stacją dokującą/automatycznym ładowaniem |
| Tryby ruchu | Kołowy, kroczący, hybrydowy (koła + nogi) |
| LiDAR | wbudowany LiDAR 3D klasy automotive, 32 linie |
| Kamery | Kamery głębi, kamery HD |
| Algorytmy | Nawigacja i lokalizacja, SDK do integracji |
| Jednostki obliczeniowe | Konfiguracja standardowa: Intel Core i5 (funkcje platformowe) / Intel Core i7 (rozwój użytkownika) Konfiguracja opcjonalna: Intel Core i7 + NVIDIA Jetson Orin NX (obsługa do 3 jednostek obliczeniowych jednocześnie) |

Robot czworonożny UNITREE B2-W z LiDAR
Produkt dostępny
Kod produktu: 112.077269 21918
EAN: 5907085525587


